UGSLoc
CVPR 2026 · Rethinking pose refinement in 3D Gaussian Splatting under pose prior and geometric uncertainty
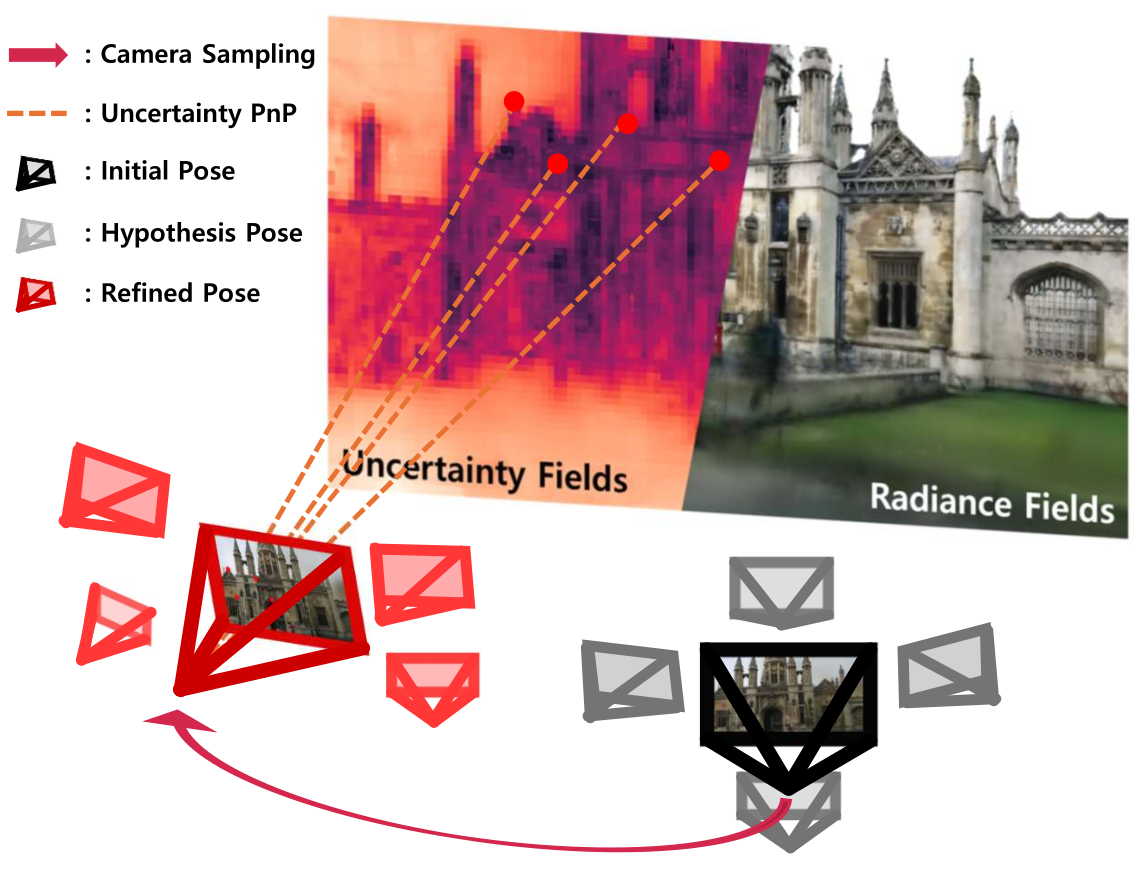
We study camera pose refinement when mapping and localizing with 3D Gaussian Splatting (3DGS), under noisy pose priors and geometric uncertainty. The released code accompanies our CVPR 2026 paper.
Paper: arXiv:2603.16538